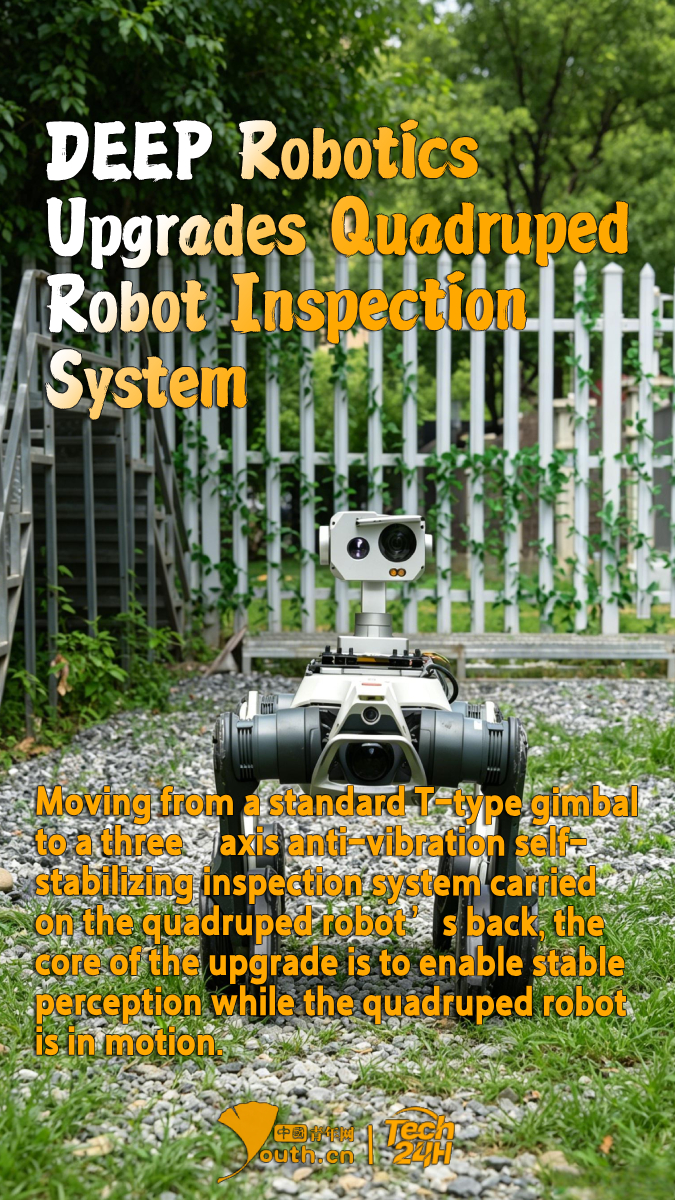
【#Tech24H】Recently, DEEP Robotics has comprehensively upgraded the stability of its quadruped robot inspection system. Focusing on dynamic inspection scenarios with quadruped robots, the company has collaboratively optimized motion control, a gimbal self-stabilization system, load vibration damping structures, preset point reset algorithms, and visible light and thermal imaging acquisition chains. Moving from a standard T-type gimbal to a threeaxis anti-vibration self-stabilizing inspection system carried on the quadruped robot’s back, the core of the upgrade is to enable stable perception while the quadruped robot is in motion. All data collected by Deep Robotics’ quadruped robots is aggregated into a backend intelligent analysis system, where computation, analysis, and result output are completed, forming a closed-loop inspection workflow. This meets the demands for routine, highprecision inspection in various complex scenarios. [ By Zhang Liyan | Tang Ruohan ]



